


 如果结果不匹配,请
如果结果不匹配,请 
 更多“设非线性系统状态方程为:试确定平衡状态的稳定性。”相关的问题
更多“设非线性系统状态方程为:试确定平衡状态的稳定性。”相关的问题
第1题
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
点击查看答案
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第2题
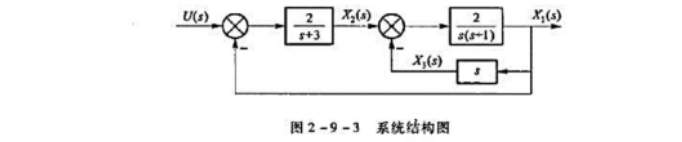
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确定该系统是否完全可控和完全可观测。
第4题
设非线性系统结构图如图所示,其中参数K1、K2、T1、T2、M均为正。试确定: (1)系统发生自振时,各参数应满足的条
设非线性系统结构图如图所示,其中参数K1、K2、T1、T2、M均为正。试确定:

(1)系统发生自振时,各参数应满足的条件。
(2)自振频率和振幅。
第5题
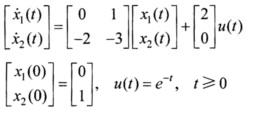
已知系统的微分方程为 y"'(t)+6y"(t)+11y'(t)+6y(t)=2e'(t)+8e(t) 试写出其状态方
已知系统的微分方程为
y"'(t)+6y"(t)+11y'(t)+6y(t)=2e'(t)+8e(t)
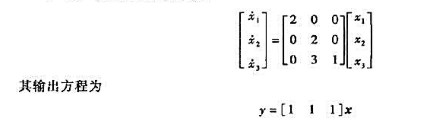
试写出其状态方程和输出方程。
第6题
设系统微分方程为 式中,u为输入量;x为输出量。 (1)设状态变量x1=x,,试列写动态方程; (2)设状态变换,,试确
设系统微分方程为 式中,u为输入量;x为输出量。
式中,u为输入量;x为输出量。
(1)设状态变量 试列写动态方程;
试列写动态方程;
(2)设状态变换 试确定变换矩阵T及变换后的动态方程。
试确定变换矩阵T及变换后的动态方程。
第8题
某非线性系统如图8-29所示,图中非线性环节的描述函数为,试确定系统产生自振的振幅和频率。
某非线性系统如图8-29所示,图中非线性环节的描述函数为
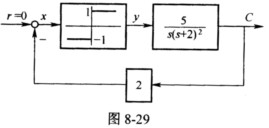 ,试确定系统产生自振的振幅和频率。
,试确定系统产生自振的振幅和频率。

第9题
考虑三阶系统这里σ、β均为实数。试确定系统平衡状态x=0渐近稳定、李氏(Lyapunov)稳定及不稳定时,
考虑三阶系统
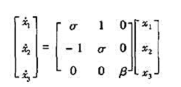
这里σ、β均为实数。试确定系统平衡状态x=0渐近稳定、李氏(Lyapunov)稳定及不稳定时,σ、β应满足的条件。

















