 如果结果不匹配,请
如果结果不匹配,请 
 更多“计算图示机构的自由度,并指出其中是否含有复合铰链、局部自由度…”相关的问题
更多“计算图示机构的自由度,并指出其中是否含有复合铰链、局部自由度…”相关的问题
第1题
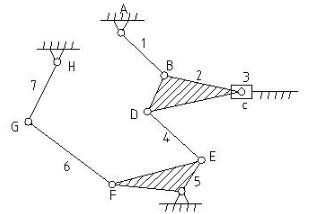
试求图示机构:(1)计算自由度;(2)分别取构件1和7为原动件,拆出所有杆组,并确定机构的级别(必须
试求图示机构:(1)计算自由度;(2)分别取构件1和7为原动件,拆出所有杆组,并确定机构的级别(必须
点击查看答案
画出各杆组)。
第2题
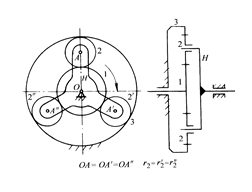
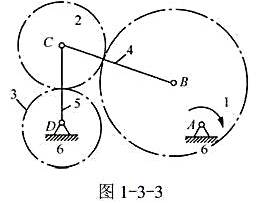
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。 (1)求该机构的
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。
(1)求该机构的自由度(要求有具体计算过程);
(2)用瞬心法求机构在图示位置时的传动比 (列出计算表达方式即可);
(列出计算表达方式即可);
(3)针对图示机构位置,直接在图上将机构中的高副化为低副;
(4)另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
第4题
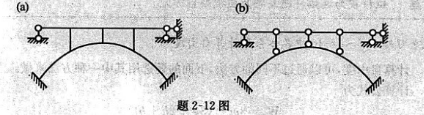
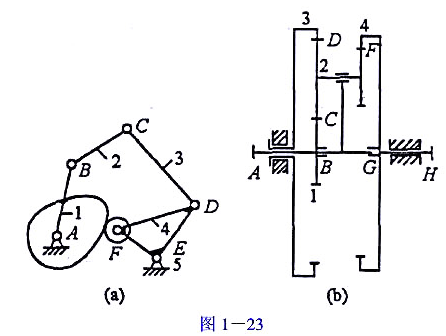
计算图示机构的自由度,若有复合铰链、局部自由度、虚约束,必需注明。试判断下列哪个分析是错误的。()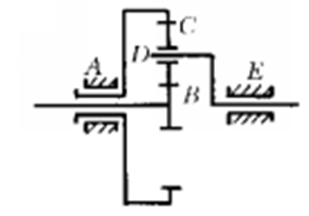
A.机构中的活动构件数n = 4
B.机构中A处为复合铰链,而无局部自由度,pl = 4,ph=2 ,F '=0
C.D处齿轮被B和C处两高副约束,右侧两副杆连接所引入约束为虚约束,p '=1
D.机构自由度计算结果应为F = 2
第5题
图2-39所示为一小型压力机,其中,1为滚子;2为摆杆;3为滑块;4为滑杆;5为齿轮及凸轮;6为连杆;7为
齿轮及偏心轮;8为机架;9为压头。试绘制其机构运动简图,并计算其自由度。
点击查看答案

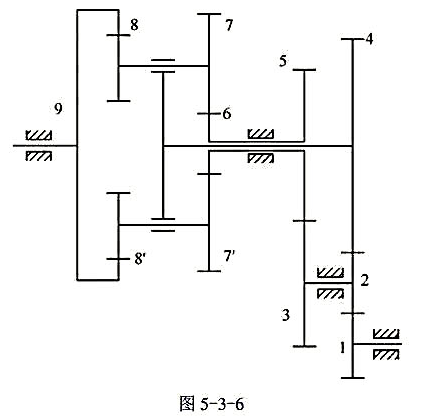
第6题
在图5-3-6所示的轮系中,已知各齿轮均为标准直齿圆柱齿轮,且模数相等,z1=z2=z6=z
8=20,z3=z5=50,z4=80,z7=40。试求:
点击查看答案
(1)该轮系的自由度,并指出是否存在局部自由度以及虚约束。
(2)求传动比。