

 如果结果不匹配,请
如果结果不匹配,请 
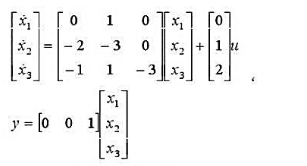
 更多“给定下列状态空间表达式求系统的传递函数”相关的问题
更多“给定下列状态空间表达式求系统的传递函数”相关的问题
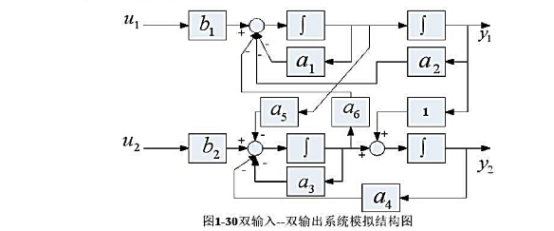
![设系统状态空间描述为 y=[0 1]x (1)画出系统的状态结构图; (2)求系统的传递函](https://img2.soutiyun.com/ask/uploadfile/5403001-5406000/9bf3955ee695a70bbc45546444a1f601.jpg)
第3题
给定系统的状态空间表达式为 y=[0 1]x 设计一全维状态观测器,并使观测器的极点为-10。
给定系统的状态空间表达式为
![给定系统的状态空间表达式为 y=[0 1]x 设计一全维状态观测器,并使观测](https://img2.soutiyun.com/ask/2019-12-06/944482151852516.png) y=[0 1]x
y=[0 1]x
设计一全维状态观测器,并使观测器的极点为-10。
第4题
线性系统的传递函数为 (1)试确定a的取值,使系统为不能控,或成为不能观测的; (2)在上述a的取值下,求使系
线性系统的传递函数为
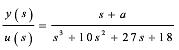
(1)试确定a的取值,使系统为不能控,或成为不能观测的;
(2)在上述a的取值下,求使系统为能控的状态空间描述;
(3)在上述a的取值下,求使系统为能观测的状态空间描述。
第5题
下列关于状态空间模型的描述中正确的是?()
A.对于一个系统,只能选取唯一一组状态变量
B.模型的结束就是不一定是系统中含有储能元件的个数
C.经非奇异变换后的状态空间模型具有不同的特征多项式和稳定性
D.对于线性定常系统的状态空间模型,经常数据阵非奇异变换后的模型。其传递函数的零点是没有差别的

第10题
下列关于传递函数的说法中,错误的有 ()。
A.传递函数只适用于线性定常系统
B.传递函数只能用于单输入,单输出的系统
C.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响
D.闭环传递函数的极点决定了系统的稳定性
















