如果结果不匹配,请
如果结果不匹配,请 
 更多“最小相位系统是指系统的开环传递函数的极点位于S平面的左半平面…”相关的问题
更多“最小相位系统是指系统的开环传递函数的极点位于S平面的左半平面…”相关的问题


已知最小相位系统的开环对数幅频特性的折线图如图5-1所示。
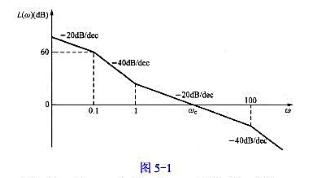
(1)确定系统的开环传递函数。
(2)根据开环对数幅频特性的折线图确定幅值穿越频率ωc和系统的相角稳定裕度γ。
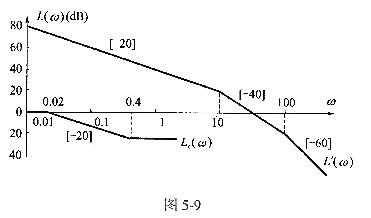
如图所示,最小相位系统开环对数幅频渐近特性为L'(ω),串联校正装置对数幅频特性渐近曲线为Lg(ω)。
(1)求未校正系统开环传递函数G0(s)及中联校正装置Gc(s);
(2)在图中画出校正后系统的开环对数幅频渐近特性L"(w),并求出校正后系统的相位裕度γ";
(3)简要说明这种校正装置的特点。
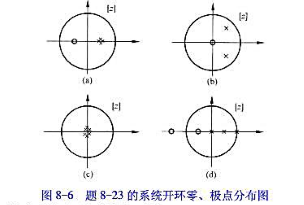
已知系统的开环传递函数分别为

分别采用根轨迹同伦法设计串联校正装置Ge(s),使得系统的闭环极点为s1.2=-2+j。
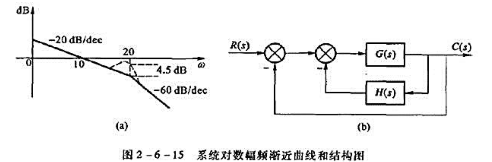
系统开环传递函数G(s)没有右半平面的零、极点,其对应的对数幅频渐近曲线如图2-6-15所示。若采用加内反馈校正的方法,消除开环幅频特性中的谐振峰,试确定校正装置的传递函数H(s)。
已知单位负反馈系统的开环传递函数为

试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡角频率ωn=2时的Kg值。
某单位负反馈系 统的开环传递函数为
(1)绘制Kg由0→∞变化的根轨迹。
(2)求系统产生持续等幅振荡时的Kg值和振荡频率。

(3)确定系统呈阻尼振荡动态响应的Kg值范围。
(4)求主导复数极点具有阻尼比为0.5时的Kg值。
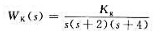
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
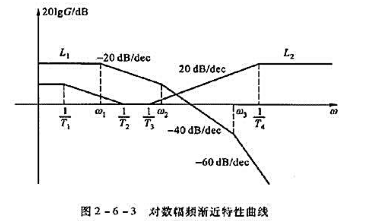
已知单位负反馈系统,原有的开环传递函数G0(s)和校正装置Gc(s)的对数幅频渐近曲线分别如图2-6-3中L1和L2所示。并设G0(s)与Gc(s)均没有右半平面的极点和零点。要求写出Gc(s)G0(s)的表达式并画出它所对应的对数幅频渐近曲线,分析Gc(s)对系统的校正作用。