

 如果结果不匹配,请
如果结果不匹配,请 
 更多“系统在作用下的稳态误差,说明()。”相关的问题
更多“系统在作用下的稳态误差,说明()。”相关的问题
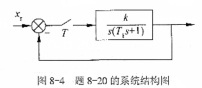
图8-4所示系统,令T=1,要求在xc(t)=t作用下的稳态误差ess=0.25T ,试确定系统稳定时Ti的取值范围。
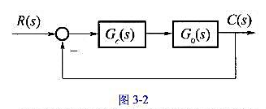
某系统结构如图所示,其中
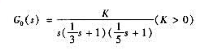
试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。
的稳态误差为enn=-0.099?
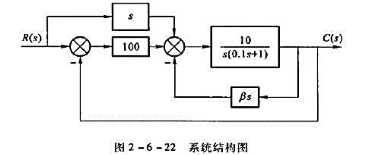
系统结构图如图2-6-22所示。选取β值使C(s)/R(s)为一阶无差度系统,并求这时阶跃响应的调节时间和系统在r(t)=t作用下的稳态误差。
控制系统方框图如图3-4所示。试求:
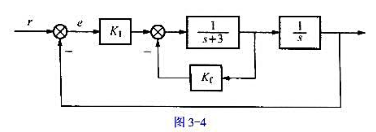
(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡频率ωn以及系统对单位斜坡输入的稳态
误差ess;
(2)当K1=25和Kt=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,在单位斜坡输入信号作用下系统的稳态误差ess=0.1。试确定K1和Kt的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽,上升时间和调整时间。
单位反馈小功率随动系统的开环传递函数为 ,试设计-一个无源校正网络,使系统的相位裕度不小于45%,穿越频率不低于50rads,并要求该系统在速度输入信号为100rad/s作用下,其稳态误差为0.5rad.
,试设计-一个无源校正网络,使系统的相位裕度不小于45%,穿越频率不低于50rads,并要求该系统在速度输入信号为100rad/s作用下,其稳态误差为0.5rad.
已知单位反馈系统的开环传递函数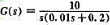 试分析:
试分析:
(1)系统是否满足超调虽σp%≤5%的要求?
(2)若不满足要求,可采用速度反馈进行改进,画出改进后系统的结构图,并确定速度反馈的参数。
(3)求出改进后系统在输入信号r(t)=2t作用下的稳态误差。
已知单位负反馈系统的开环传递函数为:
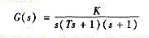
其中K>0、T>0。试确定使闭环系统稳定时,参数K、T应满足的关系:并计算在输入r(t)=tX1(t)作用下系统的稳态误差。
已知单位反馈系统的开环传递函数为 试完成:
试完成:
(1)绘制系统的根轨迹图;
(2)确定系统稳定时K的取值;
(3)求出系统在单位阶跃输入下,稳态误差可能到达的最小绝对值 。
。
已知单位反馈系统的开环传递函数
(1)绘制当K0=0→∞变化时系统根轨迹图(求出渐近线,分离点与虚轴交点);
(2)确定开环增益K的取值范围,使系统满足以下条件:

(3)确定在单位斜坡输入下系统稳态误差的最小值。
















