如果结果不匹配,请
如果结果不匹配,请 
 更多“在选定()的运动规律及凸轮的转向和基圆半径后,便可设计凸轮的…”相关的问题
更多“在选定()的运动规律及凸轮的转向和基圆半径后,便可设计凸轮的…”相关的问题
A.根据推杆的运动规律按选定的某一分度值计算出各分点的位移值
B.选取比例尺,画出基圆及推杆起始位置
C.求出推杆在反转运动中占据的各位置
D.求推杆尖顶在复合运动中依次占据的位置;将推杆尖顶的各位置点连成一条光滑曲线,即为凸轮的理论廓线。用包络的方法求凸轮的实际廓线
A.压力角愈大,机构的受力愈有利
B.基圆半径愈大,凸轮轴上的不平衡量减小,不易引起振动
C.在载荷和运动规律决定后,压力角愈大,相应的凸轮基圆半径愈小,机构愈紧凑
D.滚子半径过大,会使工作轮廓线的曲率半径变小,甚至变尖,严重的会出现运动失真
A.增大基圆半径
B.采用偏置从动件
C.在满足工作要求的前提下,选择不同的从动件的运动规律
D.对凸轮机构的压力角加以限制

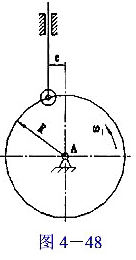
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
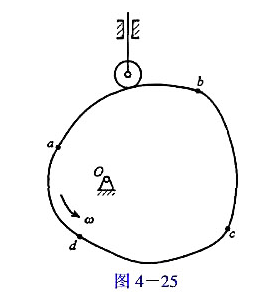
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.