

 如果结果不匹配,请
如果结果不匹配,请 
 更多“如果顶点的总数为n,则Prim算法总共要选择n-1条边来构成…”相关的问题
更多“如果顶点的总数为n,则Prim算法总共要选择n-1条边来构成…”相关的问题
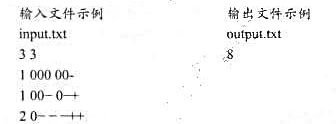
试设计一个算法,利用T公司提供的m个补丁程序,将原软件修复成一个没有错误的软件,并使修复后的软件耗时最少.
算法设计:对于给定的n个错误和m个补丁程序,找到总耗时最少的软件修复方案.
数据输入:由文件input.txt提供输入数据.文件第1行有2个正整数n和m,n表示错误总数,m表示补丁总数(1≤n≤20,1≤m≤100).接下来m行给出了m个补丁的信息.每行包括一个正整数,表示运行补丁程序i所需时间以及2个长度为n的字符串,中间用个空格符隔开.在第1个字符串中,如果第k个字符bk为“+”,则表示第k个错误属于B1[i],若为“-”,则表示第k个错误属于B2[i],若为“0”,则第k个错误既不属于B1[i]也不属于B2[i],即软件中是否包含第k个错误并不影响补丁i的可用性.在第2个字符串中,如果第k个字符bk为“+”,则表示第k个错误属于F1[i],若为“-”,则表示第k个错误属于F2[i],若为“0”,则第k个错误既不属于F1[i]也不属于F2[i],即软件中是否包含第k个错误不会因使用补丁i而改变.
结果输出:将总耗时数输出到文件output.txt.如果问题无解,则输出0.
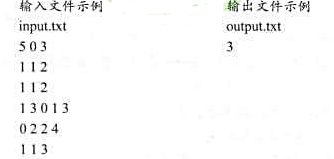
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
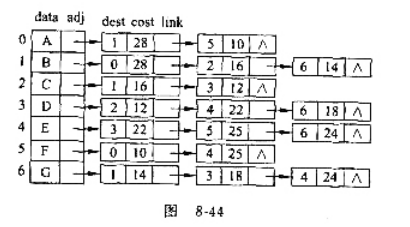
程分为若于阶段,每一阶段选取若干条边.算法思路如下:
(1)将每个顶点视为一棵树,图中所有顶点形成一个森林;
(2)为每棵树选取一条边,它是该树与其他树相连的所有边中权值最小的一条边,把该边加入生成树中。如果某棵树选取的边已经被其他树选过,则该边不再选取。
重复以上操作,直到整个森林变成一棵树。
以图8-44所示的图为例,写出执行以上算法的过程。
A、Kruskal算法
B、Dijkstra算法
C、Floyd算法
D、Prim算法
不相交的子集A和B=V-A,并且这两个子集具有下列性质:
(a)A中任何两个顶点在G中都不是相互邻接的;(b)B中任何两个顶点在G中都不是相互邻接的。例如,图8-34就是二部图。对V(G)的一个划分可能是A=(0,3,4,6)和B=(1,2,5,7).
(1)试编写一个算法,判断图G是否是二部图。如果图G是二部图,则你的算法应当把项点划分成为具有上述性质的两个互不相交的子集A和B。证明:当用邻接表表示图G时,这个算法的复杂度可以做到O(n+e)。其中n是图G的顶点个数,e是边数。
(2)证明:任何-棵树都是二部图
(3)证明:当且仅当图G不包含奇数条边的回路时.它是二部图。
若AOE网络的每一项活动都是关键活动。令G是将该网络的边去掉方向和权后得到的无向图。
(1)如果图中有一条边处于从开始顶点到完成顶点的每一条路径上,则仅加速该边表示的活动就能减少整个工程的工期。这样的边称为桥(bridge)。证明若从连通图中删去桥,将把图分割成两个连通分量。
(2)编写一个时间复杂度为O(n+e)的使用邻接表表示的算法,判断连通图G中是否有桥,若有。输出这样的桥。
















