如果结果不匹配,请
如果结果不匹配,请 
 更多“若降低扩声系统阻尼系数,对扬声器系统高频特性的影响最大。( …”相关的问题
更多“若降低扩声系统阻尼系数,对扬声器系统高频特性的影响最大。( …”相关的问题
第1题
根据汽车车身单质量系统的分析,如果汽车悬架系统的刚度系数和阻尼系数不变,汽车从空载到满载状态,会导致()。
A.系统固有频率降低
B.系统阻尼比降低
C.悬架动挠度减小
D.车身加速度降低
第2题
控制系统方框图如图3-4所示。试求:(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡
控制系统方框图如图3-4所示。试求:
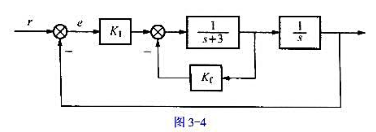
(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡频率ωn以及系统对单位斜坡输入的稳态
误差ess;
(2)当K1=25和Kt=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,在单位斜坡输入信号作用下系统的稳态误差ess=0.1。试确定K1和Kt的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽,上升时间和调整时间。
第6题
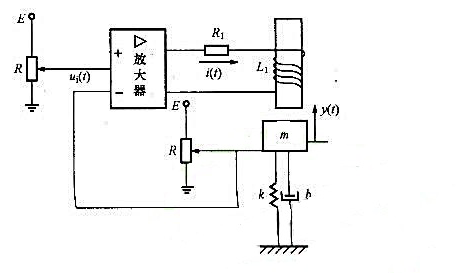
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电阻与电感;m为衔铁的质量;k为弹簧的弹性系数;b为阻尼器的阻尼系数;放大器的增益为A1。假设电磁线圈对衔铁m产生的作用力为f=kti(t);电磁线圈的反电动势为 , 画出系统的原理方框图,并简要说明其工作原理。
, 画出系统的原理方框图,并简要说明其工作原理。