如果结果不匹配,请
如果结果不匹配,请 
 更多“二阶系统响应性能改善可以通过()。”相关的问题
更多“二阶系统响应性能改善可以通过()。”相关的问题
第1题
(1)系统的特征方程为s3+4s2+s+4=0,由Routh判据判断系统的稳定性,并求出系统的闭
(1)系统的特征方程为s3+4s2+s+4=0,由Routh判据判断系统的稳定性,并求出系统的闭环极点。
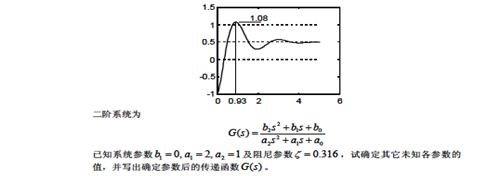
(2)系统的单位反馈二阶系统的开环传递函数为 为改善系统的性能加入测速反馈as,试求加入测速反馈后系统的无阻尼自然振荡频率,阻尼比和开环增益K,并说明测速反馈对系统性能有哪些影响。
为改善系统的性能加入测速反馈as,试求加入测速反馈后系统的无阻尼自然振荡频率,阻尼比和开环增益K,并说明测速反馈对系统性能有哪些影响。
第2题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
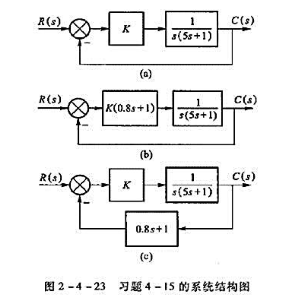
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第3题
为了改善系统的性能,通过在多台计算机之间合理地分配负载,使各台计算机的负载基本均衡,这种计算能力共享的形式,通常被称为负载均衡或负载共享。负载均衡从分配算法角度可以分为()。
A.静态负载均衡
B.细粒度负载均衡
C.动态负载均衡
D.粗粒度负载均衡