题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某假想机主要部件如图9.11所示,其中: LA ALU的A输入端选择器 LB ALU的B输
入端选择器 M 主存 MDR 主存数据寄存器 IR 指令寄存器 MAR 主存地址寄存器 PC 程序计数器 R0~R3 通用寄存器 C、D 暂存器
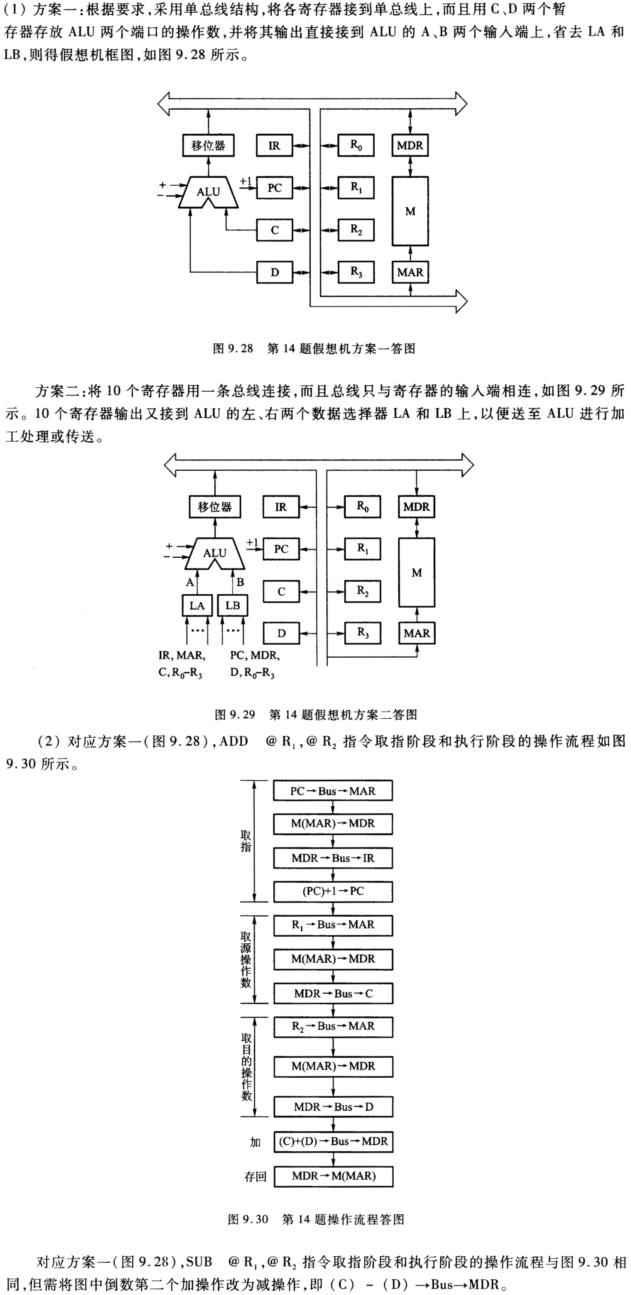
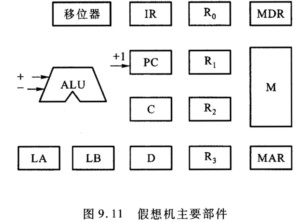 (1)补充各种部件之间的主要连接线,并注明数据流动方向。 (2)写出ADD @R1,@R2和SUB @R1,@R2指令取指阶段和执行阶段的信息流程。R1寄存器中存放源操作数的地址,R2寄存器中存放的是目的操作数的地址。
(1)补充各种部件之间的主要连接线,并注明数据流动方向。 (2)写出ADD @R1,@R2和SUB @R1,@R2指令取指阶段和执行阶段的信息流程。R1寄存器中存放源操作数的地址,R2寄存器中存放的是目的操作数的地址。
 答案
答案
 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“某假想机主要部件如图9.11所示,其中: LA ALU的A输…”相关的问题
更多“某假想机主要部件如图9.11所示,其中: LA ALU的A输…”相关的问题
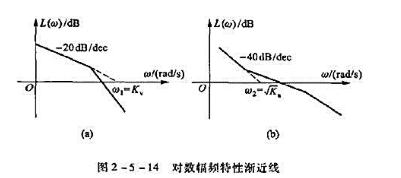
 其中:
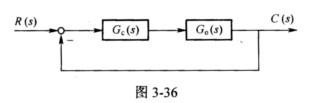
其中: 。试设计校正环节Gc(s),使该系统在输入r(t)=t作用下的稳态误差为零。
。试设计校正环节Gc(s),使该系统在输入r(t)=t作用下的稳态误差为零。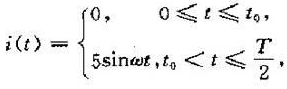
 =100π)
=100π) 内电流的平均值;
内电流的平均值; (A)和
(A)和 (A),问相应的触发时间应为多少?
(A),问相应的触发时间应为多少?

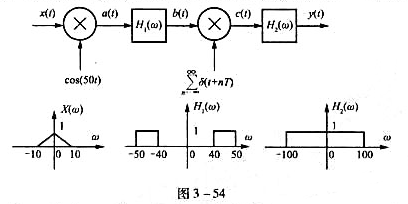
 其中h(t)为该系统的单位冲激响应.试求:
其中h(t)为该系统的单位冲激响应.试求: