题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
当且仅当一个科学家有h篇被引次数至少为h的论文,同时剩余论文的被引次数都小于h时,该科学家的成就分值为h(Hirsch)。()
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“当且仅当一个科学家有h篇被引次数至少为h的论文,同时剩余论文…”相关的问题
更多“当且仅当一个科学家有h篇被引次数至少为h的论文,同时剩余论文…”相关的问题
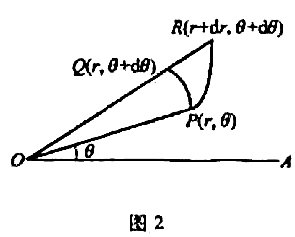
(1)以O为原点建立极坐标系(r,θ).A点位于θ=0的向径上,见图2.分析图2中由P.Q,R组成的小三角形,证明在有限时间内飞机一定可以搜索到潜艇的航线,是先从A点沿直线飞到某点P0再从P0沿一条对数螺线飞行一周,而P0是一个圆周上的任一点给出对数螺线的表达式.并西出一条航线的示意图。
(2)为了使整条航线是光滑的;直线段应与对数螺线在P0点相切.找出这条光滑的航线。
(3)在所有一定可以发现潜艇的航线中哪一条航线最短,长度是多少?光滑航线的长度又是多少测?
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
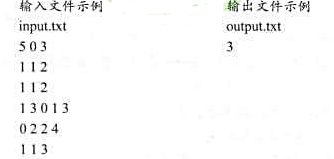
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"







 为群
为群 的子群,求证:H为正规子群当且仅当对任何元素g
的子群,求证:H为正规子群当且仅当对任何元素g G有
G有
 为群,H为G的非空子集:证明:
为群,H为G的非空子集:证明: 的子群当且仅当对任意元素a,b
的子群当且仅当对任意元素a,b H有a*b-1
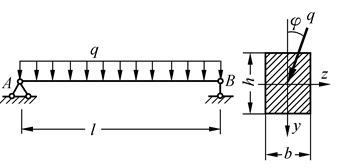
H有a*b-1 的夹角。已知
的夹角。已知 。当截面高宽比 h/b=1.5时, b的尺寸取值为()。
。当截面高宽比 h/b=1.5时, b的尺寸取值为()。