如果结果不匹配,请
如果结果不匹配,请 
 更多“反馈控制系统如题图所示,如果要求闭环系统的特征根全部位于s平…”相关的问题
更多“反馈控制系统如题图所示,如果要求闭环系统的特征根全部位于s平…”相关的问题
第1题
设单位反馈控制系统的开环传递函数为根轨迹图如题图所示。(1)当系统的阻尼振荡频率时,试确定闭环
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
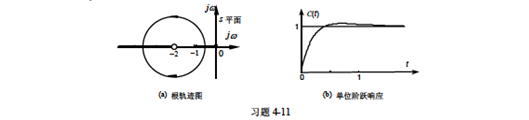
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
第2题
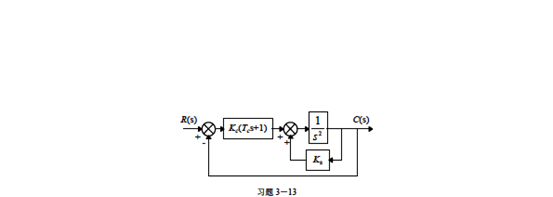
已知某控制系统如题图所示,内环为正反馈,反馈系数为是不稳定的,在反馈的基础上增加前向通路比例
已知某控制系统如题图所示,内环为正反馈,反馈系数为 是
是
不稳定的,在反馈的基础上增加前向通路比例一微分控制时,系统可以稳定。试确定
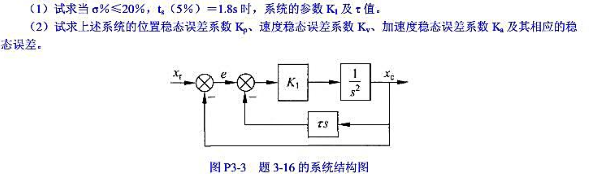
(1)系统稳定时,P=D控制器参数K,I的取值条件:
(2)当正反馈系数Ks=0.8时,要求系繞阶跃响应的超调量Mp=163%和过波时间ts=08秒,试确定P-D控制器参数Ke,Te的取值.
第3题
设采用了非线性反馈的某控制系统结构图如题图所示,试采用等倾线法绘制输入信号为r(t)=R.1(t)时系
设采用了非线性反馈的某控制系统结构图如题图所示,试采用等倾线法绘制输入信号为r(t)=R.1(t)时系统的相轨迹图。


 的频示宽度增加一倍再作校正设计,试设计局部闭环结构。
的频示宽度增加一倍再作校正设计,试设计局部闭环结构。
第6题
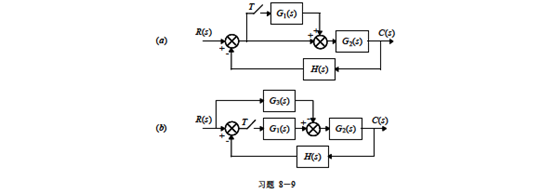
设控制系统的结构阳如题图(a)、(b)所示。图(a)中K5为速度反馈系数,试绘制以K5为参变量的根
设控制系统的结构阳如题图(a)、(b)所示。图(a)中K5为速度反馈系数,试绘制以K5为参变量的根轨连图。图(b)中T功微分时间常数,试绘制以T为参变量的根轨迹图。

第7题
已知系统结构图如题图所示,采样间隔为T=1秒,试求取开环冲传递函数GO(z),闭环脉冲传递函数G
已知系统结构图如题图所示,采样间隔为T=1秒,试求取开环冲传递函数GO(z),闭环脉冲传递函数G
点击查看答案
e
(z),及系统的单位阶跃响应c(t)。
第9题
设负反馈控制系统中要求:①概略绘制系统根轨迹图(0<K*<∞),并判断闭环系统的稳定性。②如果改变反
设负反馈控制系统中
要求:
①概略绘制系统根轨迹图(0<K*<∞),并判断闭环系统的稳定性。
②如果改变反馈通道的传递函数,使H(s)=1+2s,重做第①小题,并讨论H(s)的变化对系统稳定性的影响。