
 如果结果不匹配,请
如果结果不匹配,请 
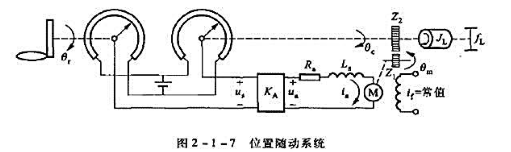
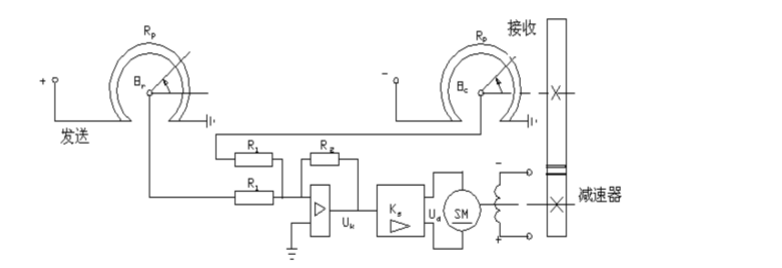
 更多“位置随动系统的原理图如图2-1-7所示。试说明系统的工作原理…”相关的问题
更多“位置随动系统的原理图如图2-1-7所示。试说明系统的工作原理…”相关的问题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
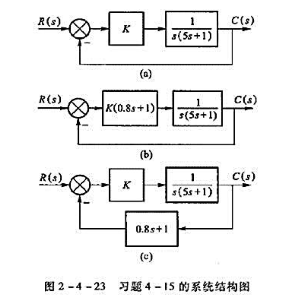
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
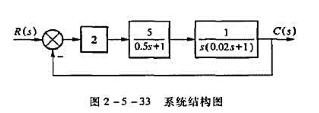
设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K应取何值,调节时间ts是多少?

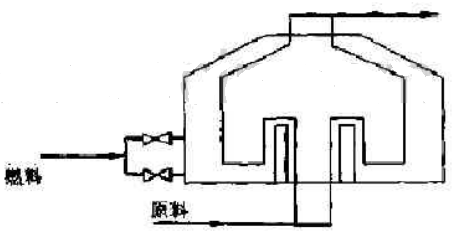
某加热炉系统如图11-7所示,工艺要求介质出口物料的温度稳定,无余差,已知燃料人口的压力波动频繁,是该控制系统的主要干扰。试根据上述要求设计一个温度控制系统,画出控制系统原理图和方块图,确定控制阀的作用形式,选择合适的控制规律和控制器正、反作用。
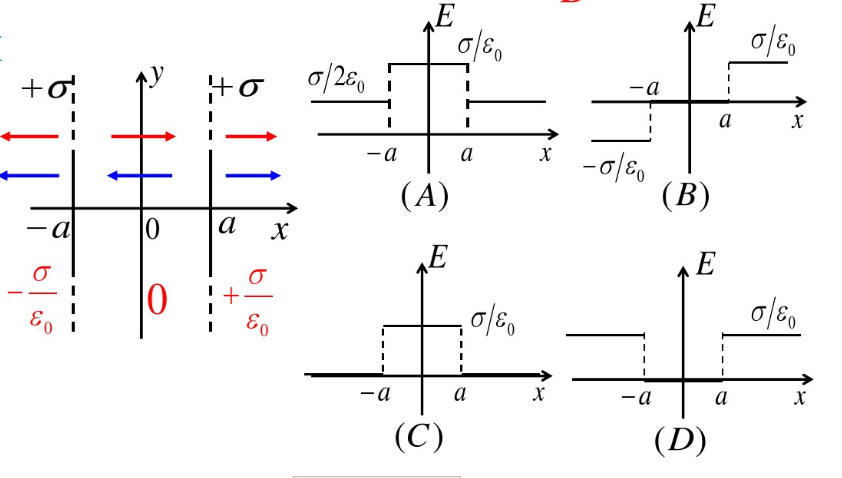
电荷面密度均为+σ的两块“无限大”均匀带电的平行平板如图(a)所示放置,其周围空间各点电场强度E(设电场强度方向向右为正、向左为负)随位置坐标x变化的关系曲线为图(b)中的( ).
如图甲所示,在水平地面上放置一个质量为m=4Kg的物体,让其在随位移均匀减小的水平推力作用下运动,推力随位移变化的图像乙所示。已知物体与地面间的动摩擦因数为μ。下列说法正确的是()。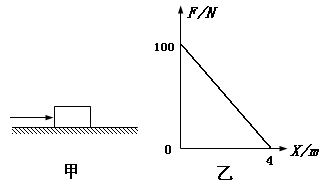
A.物体先做加速运动,推力撤去时开始做减速运动
B.物体在水平面上运动的最大位移是12m
C.物体在运动中的加速度先变小后不变
D.物体运动的最大速度为8m/s
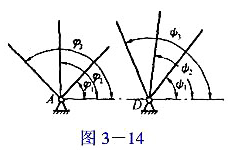
如图3-14所示,已知φ0= φ0=0°,原动件和从动件的三对对应位置为:
1=45°, 1=52°10'; φ2=90°,ψ2=82°10';φ3=135°,ψ3=112°10'.机架长度lCD=50mm.试用解析法设计此机构.
1=52°10'; φ2=90°,ψ2=82°10';φ3=135°,ψ3=112°10'.机架长度lCD=50mm.试用解析法设计此机构.
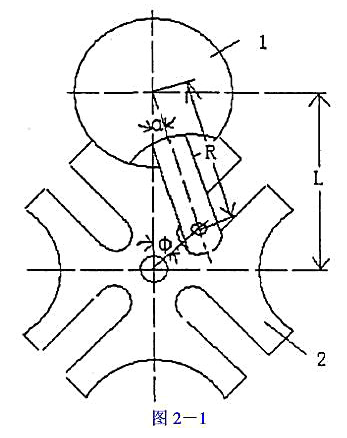
如图2-1所示为外槽轮机构在运动过程中的任一位置,设拨盘1的位置用角度a来确定,而槽轮2的位置用角度 来确定.圆销的回转半径为R,中心距离为L,拨盘以等速
来确定.圆销的回转半径为R,中心距离为L,拨盘以等速 1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度
1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度 2.
2.