一个二阶IIR滤波器的系统函数为现用b位字长的定点制运算实现它,尾数作舍入处理。(1)试计算直接
一个二阶IIR滤波器的系统函数为

现用b位字长的定点制运算实现它,尾数作舍入处理。
(1)试计算直接I型及直接II型结构的输出舍入噪声方差
(2)如果用一阶网络的级联结构来实现H(z).则共有六种网络流图.试画出有运算舍入噪声时的每种网络流图并计算每种流图的输出舍入噪声方差。
(3)用并联结构实现H(z),计算输出舍入噪声方差。几种结构相比较.运算精度哪种最高,哪种最低?
(4)考虑动态范围,因为系统中任一节点的输出值(包括整个系统的输出节点)等于从输入到此节点的单位冲激响应与系统输入的卷积和,可以表示成
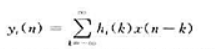
其中yi(n)为第i个节点的输出,hi(n)为从输入到第i个节点的单位抽样响应。对于输出节点来说yi(n)=y(n),hi(n)=h(n)。由上式可得

也就是说,一个网络的最大输出电平不一定在输出端.可能在某一中间节点,利用这一关系以及xmax,试求以上各种网络中每一个的最大ymax.要求网络的所有节点上都不发生溢出,即要最大输出ymax<1.这样即可求得最大的输入xmax(不发生溢出时)。试求以上各个网络的xmax
(5)设输入信号是白噪声序列.它的幅度在-xmax到xmax之间均匀分布.按照已求出的每一滤波器结构的最大输入xmax求每种结构在输出端的噪声信号比值(输出噪声方差与输出信号均方值之比)。问哪种结构输出噪声信号比值最低。
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“在节点相邻矩阵中全零列表示输出端单元,该节点在A*A、A*A…”相关的问题
更多“在节点相邻矩阵中全零列表示输出端单元,该节点在A*A、A*A…”相关的问题