

 如果结果不匹配,请
如果结果不匹配,请 
 更多“速度控制系统中必须有()无静态误差。”相关的问题
更多“速度控制系统中必须有()无静态误差。”相关的问题
第1题
设速度控制系统如图2-3-12所示。为了消除系统的稳态误差,使斜坡信号通过由比例-微分环节组成的
设速度控制系统如图2-3-12所示。
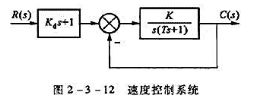
为了消除系统的稳态误差,使斜坡信号通过由比例-微分环节组成的滤波器后再进入系统。
①当Kd=0时,求系统的稳态误差(e=r-c)。
②选择Kd,使系统的稳态误差为零。
第2题
200km£¯h≥线路允许速度Vmax≥250km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态
200km/h≥线路允许速度Vmax≥250km/h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,轨向(支距)的经常保养标准为()mm。
第3题
200km£¯h≥线路允许速度Vmax≥250km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态
200km/h≥线路允许速度Vmax≥250km/h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,扭曲(mm/3m)的临时补修标准为()mm。
第4题
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态
250km/h>线路允许速度Vmax≥350km/h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,扭曲(mm/3m)的临时补修标准为()mm。
第5题
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态
250km/h>线路允许速度Vmax≥350km/h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,轨向(直股)的作业验收标准为()mm。
第7题
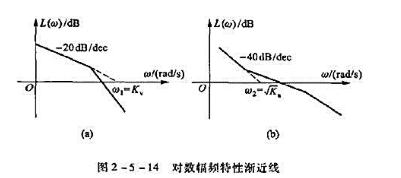
某I型和某II型系统的对数幅频特性的渐近线如图2-5-14(a)和(b)所示,试证:其中Kc和Ke分
某I型和某II型系统的对数幅频特性的渐近线如图2-5-14(a)和(b)所示,试证:
其中Kc和Ke分别为静态速度误差系数和静态加速度误差系数。
第8题
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,高低的经常保养标准为()mm。
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,道岔静态几何尺寸容许偏差管理值中,高低的经常保养标准为()mm。
点击查看答案
第9题
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,调节器静态几何尺寸容许偏差管理值中,高低的临时补修标准为()mm。
250km£¯h>线路允许速度Vmax≥350km£¯h正线上,根据《高速铁路无砟轨道线路修理规则》规定,调节器静态几何尺寸容许偏差管理值中,高低的临时补修标准为()mm。
点击查看答案
















