题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
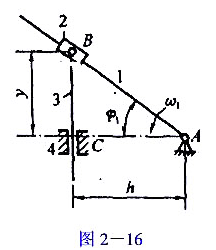
在图2-16所示的正切机构中,已知1=30°,构件1的等角速度1=6rad/s,h=400mm,试用解析法求构件3的
在图2-16所示的正切机构中,已知 1=30°,构件1的等角速度
1=30°,构件1的等角速度 1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图2-16所示的正切机构中,已知1=30°,构件1的等角速度1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
如果结果不匹配,请 联系老师 获取答案
 更多“在图2-16所示的正切机构中,已知1=30°,构件1的等角速…”相关的问题
更多“在图2-16所示的正切机构中,已知1=30°,构件1的等角速…”相关的问题
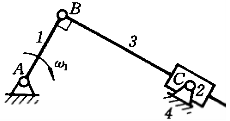
在图所示的正切机构中,已知h=500mm,l=100mm,ω1=10rad/s(为常数),构件3的重量G3=10N,质心在其轴线上,生产阻力Fr=100N,其余构件的重力和惯性力均略去不计。试求当φ1=60°时,需加在构件1上的平衡力矩Mb。
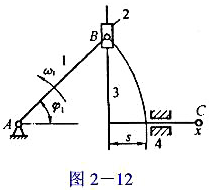
在图2-12所示正弦机构中,已知曲柄AB的等角速度为 1=20rad/s,lAB=100mm,
1=20rad/s,lAB=100mm, 1=45°,试用解析法求构件3的速度和加速度.
1=45°,试用解析法求构件3的速度和加速度.
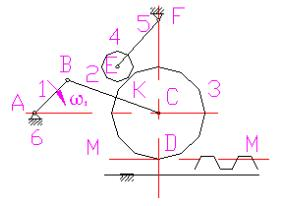
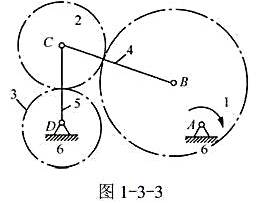
在图(a)所示的齿轮一连杆组合机构中,MM'为同定齿条,齿轮3的齿数是齿轮4齿数的2倍,已知原动件1以等角速度ω1顺时针方向回转,试以图解法求机构在图示位置时E点的速度vE以及齿轮3,4的速度影像。
在图12-1(a)所示的搬运器机构中,已知滑块质量m=20kg,lAB=lED=100mm,lBC=lCD=lEF=200mm, φ1=φ23=φ3=90°.求由作用在滑块5上的阻力F5=1kN而换算到构件1的轴A上的等效阻力矩MT及换算到轴A的滑块质量的等效转动惯量J.
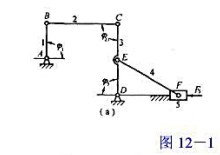
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。
(1)求该机构的自由度(要求有具体计算过程);
(2)用瞬心法求机构在图示位置时的传动比 (列出计算表达方式即可);
(列出计算表达方式即可);
(3)针对图示机构位置,直接在图上将机构中的高副化为低副;
(4)另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
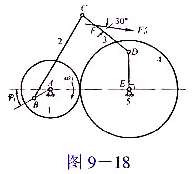
在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.
AB=25mm,lBC=127mm,lCD=76mm,lDE=50mm,φ1=30°.设ω1为顺时针方向.设作用在构件3上的总惯性力F´a=450N,lCF=20mm.其余构件上的惯性力以及各构件的重力均忽略不计.求需加于构件1上的平衡力偶矩和各运动副中的反力.
在图5-2-11所示机构中,已知z1=17,z2=20,z3=85,z4=18,z5=24,z6=21,z7=63,求:
(1)当n1=1001r/min、n4=10000r/min时,np=?
(2)当n1=n4时,np=?
(3)当n1=1001r/min、n4=10001r/min时,np=?
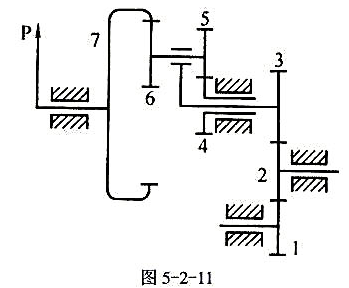
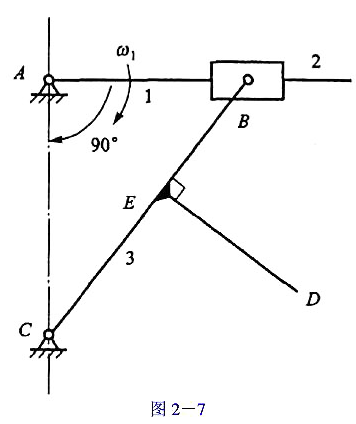
图2-7所示机构中,若已知构件1以等角速度 1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.
1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.
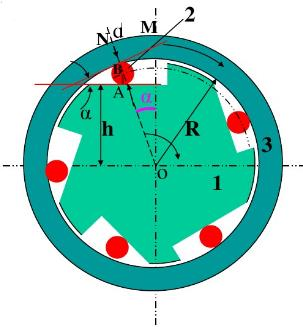
转动。设已知摩擦系数f=0.08,R=50mm,h=40mm。为保证机构能正常工作,试确定滚柱直径d的合适范围。
提示:在解此题时,要用到上题的结论。
已知图所示机构的位置,构件尺寸及原动件AB以等角速度ω1逆时针方向转动,试求:
(1)在图上标出全部速度瞬心P12、P23、P34、P14、P13和P24,并指出其中的绝对瞬心。
(2)用相对运动图解法以任意比例尺作出机构的速度图和加速度图,求构件3的角速度ω3和角加速度ε3。
(要求:①写出作图的矢量方程和主要步骤;②写出ω3及α3的表达式)。