如果结果不匹配,请
如果结果不匹配,请 
 更多“红外光栅障碍物检测指示灯编号原则:障碍物探测装置控制盒上“X…”相关的问题
更多“红外光栅障碍物检测指示灯编号原则:障碍物探测装置控制盒上“X…”相关的问题
第1题
下列对屏蔽门设备基本功能描述正确的有()。
A.屏蔽门具有障碍物检测及处理功能,并具有障碍物故障指示灯点亮显示 功能
B.可以从门头指示灯、PSC(中央控制盘) 了解屏蔽门运行状态、故障信息
C.可对发生故障的门体进行隔离旁路,隔离维修
D.屏蔽门开关门控制优先级从高到低依次为:屏蔽门与信号联锁控制(系统级)、PSL (就地控制盘即站台级)、屏蔽门专用钥匙手动操作(就地级)。
第2题
为了辨别一颗恒星周围的昏暗天体,天文学家现在通常使用一个不透光的小圆盘或者光栅除去来自恒星的光线。但是很多光线在这些障碍物周围都会产生衍射现象,就像声波在墙壁周围会产生弯曲一样。这些偏离的光线会湮没来自伴生行星的光信号,使天文学家很难观测到这些天体。“在这些障碍物周围……”中的“这些障碍物”指的是()。
A.昏暗天体
B.小圆盘或者光栅
C.恒星
D.伴生行星
第5题
根据通信传输的介质不同,可以对其进行分类,其中一类称为红外通信,因红外波波长较短,对障碍物的衍
射能力较差,只适合短距离“点对点”直线传输。下列不属于红外通信的是()
点击查看答案
A.蓝牙耳机
B.自动冲水感应器
C.空调遥控器
D.自动感应门
第9题
问题描述:机器人Rob可在一个树状路径上自由移动.给定树状路径T上的起点s和终点t,机器人要从s运
动到t.树状路径T.上有若干可移动的障碍物.由于路径狭窄,任何时刻在路径的任何位置不能同时容纳2个物体.每步可以将障碍物或机器人移到相邻的空顶点上.设计一个有效算法用最少移动次数使机器人从s运动到t.
点击查看答案
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
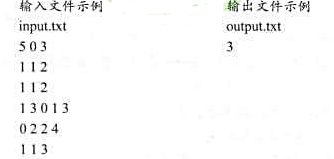
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"