如果结果不匹配,请
如果结果不匹配,请 
 更多“当PI口做输入口输入数据时,必须先向该端口的锁存器写入(),…”相关的问题
更多“当PI口做输入口输入数据时,必须先向该端口的锁存器写入(),…”相关的问题
第1题
时延是指:对于存储转发设备来说,从输入帧的最后一位到达输入口,到该帧的第一位出现在输出口的时间间隔;对于位转发设备来说,从输入帧的第一位到达输入口,到该帧的第一位出现在输出口的时间间隔。()
第2题
采用D触发器和尽量少的门电路设计一个串行数据检测器,该电路具有1个数据输入端D和1个时钟端口,
1个信号输出端F.当连续3个时钟触发时D都为1或都为0,则F输出高电平,否则输出低电平.写出电路的转移/输出表,画出逻辑电路图.
点击查看答案
第3题
使用光纤进行光口硬件环回操作需要注意?()
A.不能用眼睛直视输出光口或者和输出光口连接的尾纤端面
B.首先必须要关闭激光器输出,避免输出功率过强将尾纤端面烧毁
C.使用光功率计测量输入口功率,避免接收机过载而烧毁
D.如果没有衰耗器,可以将收端拧松,发端拧紧达到控制收光不过载的目的
第6题
试用1片八D锁存器74HC373设计一个能锁存两组BCD码信号的锁存电路。假定三态输出使能端,锁存器原
试用1片八D锁存器74HC373设计一个能锁存两组BCD码信号的锁存电路。假定三态输出使能端 ,锁存器原输出为
,锁存器原输出为 ,输入为
,输入为 ,画出锁存器锁存新数据前、后使能端LE应输入的波形和相应Q0的波形。
,画出锁存器锁存新数据前、后使能端LE应输入的波形和相应Q0的波形。
第7题
检查齿轮箱内的润滑油油位,如果没有达到规定的标准,检查齿轮箱()密封状态并无明显渗漏现象的,必须补充加注润滑油至油位计的标准范围。
A.输入端两侧
B.输出端两侧
C.注油口
D.排油口
第8题
问题描述:机器人Rob可在一个树状路径上自由移动.给定树状路径T上的起点s和终点t,机器人要从s运
动到t.树状路径T.上有若干可移动的障碍物.由于路径狭窄,任何时刻在路径的任何位置不能同时容纳2个物体.每步可以将障碍物或机器人移到相邻的空顶点上.设计一个有效算法用最少移动次数使机器人从s运动到t.
点击查看答案
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
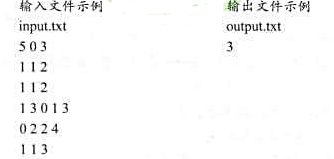
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"